LIN学习模块
目标群体
LIN(Local Interconnect Network,局域互联网)是一种串行通信技术,适用于汽车中对成本敏感的应用领域。
本E-Learning模块适用于所有希望熟悉和了解LIN通信技术的人员。
Vector培训课程
此外,本E-Learning模块还适合参加Vector培训课程或研讨会的客户。在参加培训之前,您可以了解LIN网络中数据通信的基础知识。这样就能更轻松地加入研讨会,因为在培训活动期间会重温某些内容,然后进行更深入的讲解。
相关信息
学习目标
了解LIN网络中的数据通信
要求
电子学的基础知识
动因和时间
范围
23个学习单元
学习用时
每个学习单元大约10分钟
技术文章
汽车中的串行总线系统 - 使用LIN在汽车中实现简单且经济高效的数据交换
版权声明
详情查看Vector培训官网 -《版权声明》
动因
电子化
过去几十年来,我们为汽车开发了越来越多的功能,目的是让驾驶更安全、更舒适以及更环保。在此过程中,越来越多的功能通过电子组件实现,因此对信息交换的需求也在不断增长。这些电子组件包括ECU以及传感器和执行器。
动因
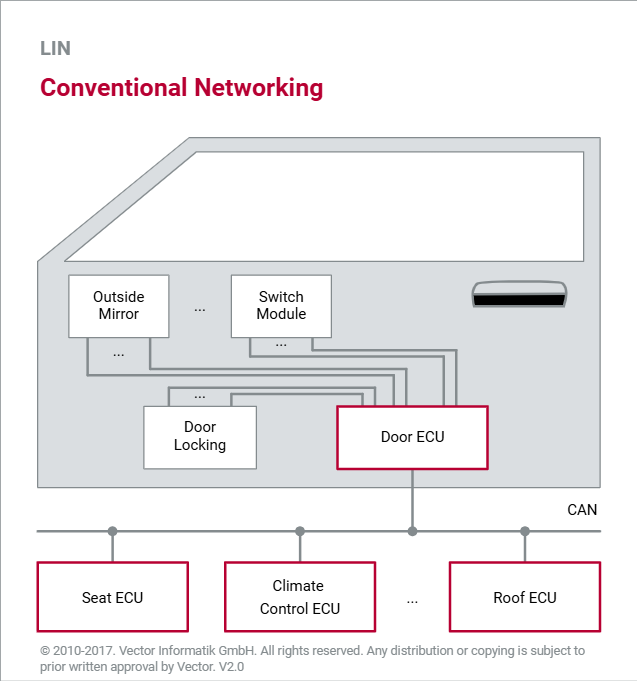
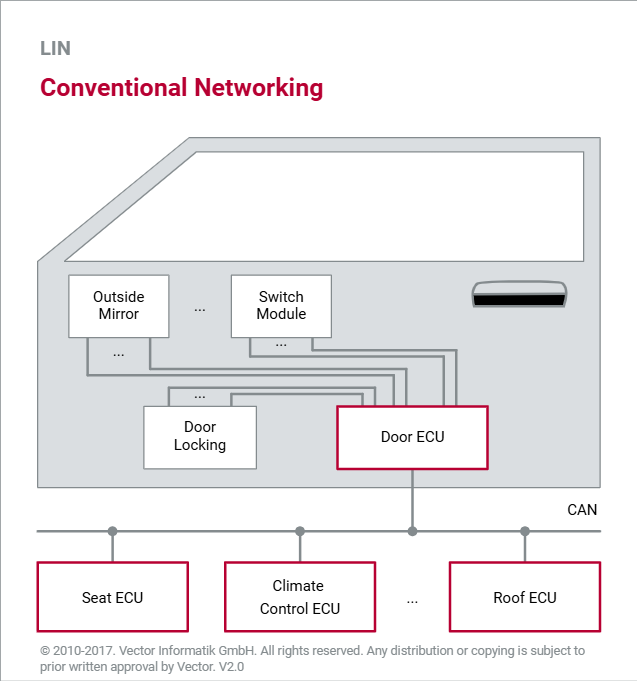
长期以来,传感器和执行器通常都是通过单独的导线连接到ECU上。(参见图片:Conventional Networking)。但连接数量的增加导致线束更粗、更重,从而对重量和空间的要求更高。此外,为不同车型生产线束也更为复杂,因为必须进行大量的定制修改。而且,线路数量增加导致系统更容易出错。综合来看,这些问题导致车载网络成本不断增加。
先驱者CAN
1983年,Robert Bosch GmbH开发了CAN,并于1986年在SAE(Society of Automotive Engineers,汽车工程学会)大会上将其作为全新串行总线系统发布。CAN可以通过一对导线对多个信号进行位串行传输,从而减少所需的线束。
降低成本
尽管如此,CAN用于连接舒适系统领域的传感器和执行器还是过于昂贵。在1990年代中期,一些汽车整车厂和供应商开始开发更经济的解决方案。由于这些专有总线系统涉及的零件较少,因而在降低成本方面的效果有限。因此,一些整车厂共同组成了LIN联盟,目的是开发统一、标准化且经济高效的通信系统。
联盟
完成条件
LIN联盟
在宝马的倡议下,戴姆勒-奔驰(现今的戴姆勒)、摩托罗拉(现今的恩智浦)和VCT(现今的明导)于1998年底成立了一个工作组,旨在开发全新的总线系统。除发起者外,工作组成员还包括奥迪、沃尔沃和大众。工作组成员作为LIN联盟的创始成员,并组成了指导委员会。
全新且经济高效
通过定义简单且经济高效的物理层、精简通信协议,以及节点和网络的软件自动开发方法(工作流),联盟定义了对全新车辆总线系统的要求。
用例
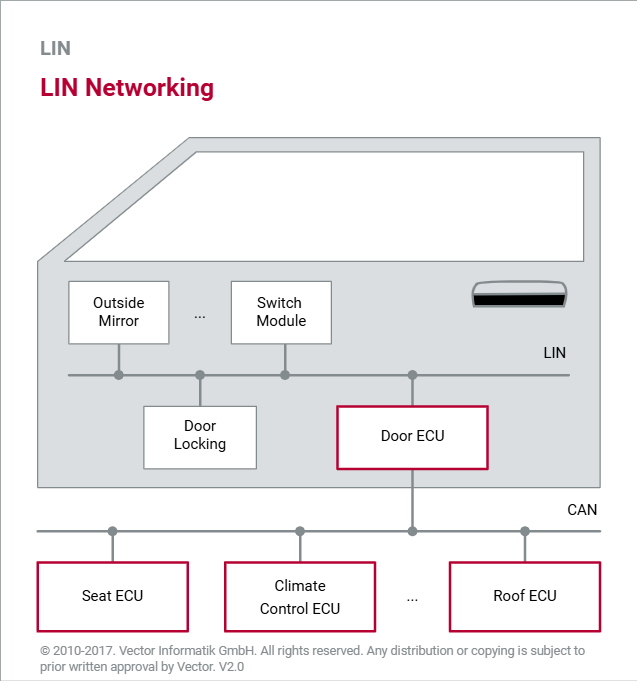
此后,LIN做为子总线,几乎用于所有车辆。LIN特别适用于汽车空调、座椅、车门和后视镜控制模块等舒适系统应用场景。与常规接线不同(参见图片:Conventional Networking),所有传感器和执行器均有总线接口,并通过总线连接至中央ECU(参见图片:Networking in LIN)。该ECU做为CAN-LIN网关。
规范
完成条件
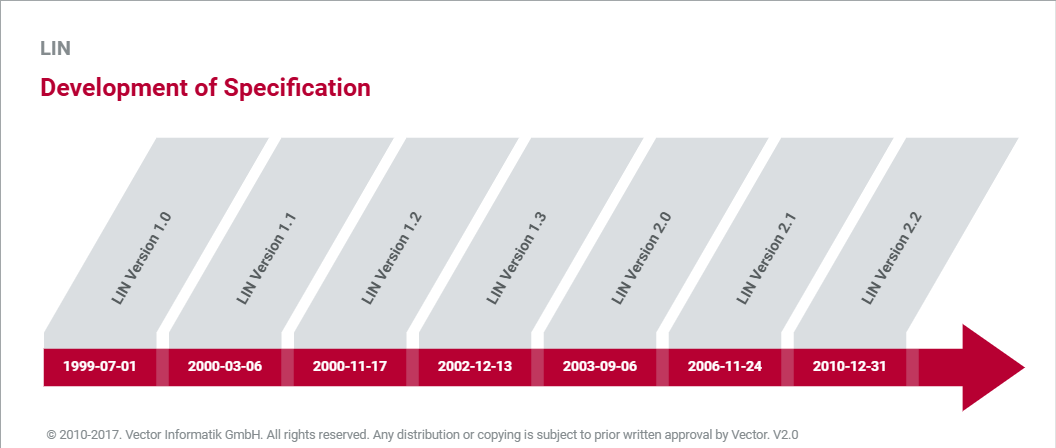
LIN 1.1
第一版规范于1999年制定。次年,联盟于底特律SAE大会上发布了1.1版本,包含以下部分:LIN协议规范、LIN配置语言规范、LIN应用程序接口规范。
LIN 1.2 / LIN 1.3
2000年对LIN1.1规范进行修订,同年11月发布了LIN1.2版本。2002年11月发布了LIN 1.3版本,特别修订了物理层。
LIN 2.0
为应对汽车行业的发展趋势,经过一年的修订,2003年9月发布了2.0版本,主要目标是利用“货架”节点的概念来提高零件产量。为了使网络的开发更经济高效、更快速、更简单和更安全,实现了软件的自动设计和生成。
“货架”节点
“货架”节点是执行简单标准任务(例如驱动电动机)的总线节点,基本上是标准产品,经过少量开发即可使用,便于大量购买。典型的应用场景包括座椅、车窗升降机、后视镜、滑动式天窗和后舱盖的控制器。LIN2.0规范还补充了配置方法和用于描述“货架”节点的语法。
LIN 2.1 / LIN 2.2
2006年11月发布了规范2.1,包含八个规范。2010年12月发布了LIN规范2.2,修正了一些小错误,并弱化了位采样规则。